PLC-S7-200 SMART ModbusRTU
本科PLC原理及应用课程——课程实验报告
实验目的
掌握Modbus RTU协议应用:
实现S7-200 SMART作为主站(Master)与从站(Slave)间的串行通信。
验证PLC对工业设备的标准通信控制能力。
熟悉西门子Modbus库指令:
实践
MBUS_CTRL、MBUS_MSG(主站)和MBUS_INIT、MBUS_SLAVE(从站)的配置与调用方法。
构建主从数据交换逻辑:
主站读取从站保持寄存器(功能码03)和写入线圈(功能码15)的操作。
从站实现数据响应及I/O映射。
理解状态机设计:
通过位标志(
M3.0、M3.1等)实现多步骤通信流程控制,避免指令冲突。
实验项目
PLC主从通讯实验,测试和验证两台西门子S7-200 SMART系列PLC之间的数据通信。最终实现了主站对从站的周期性读写轮询(读线圈→写寄存器→读线圈...)。
实验实现的数据交换如下:
主站读从站线圈(10001~10016)→ 存储到
VB0(16位=2字节)主站写5个寄存器到从站
40001→ 从站VB0~VB9(5字=10字节)从站将
VW0(VB0+VB1)映射到物理输出QW0
关于Modbus通信
Modbus:由 Modicon(现为施耐德电气)在 1979 年开发的开放协议,是工业领域最常用的通信协议之一。
RTU(Remote Terminal Unit):Modbus 的一种传输模式,采用二进制编码,数据传输效率高,相比 ASCII 模式更节省带宽。
RS485(EIA-485)是一种工业串行通信标准,定义了物理层的电气特性,用于实现设备间的数字通信。通过差分信号传输,抗干扰能力强。
通信特点
物理层:通常基于 RS-485 或 RS-232 串口,支持半双工通信。
拓扑结构:主从式架构,一个主站(Master)与多个从站(Slave)通信,从站地址范围 1-247。
由于轮询时间、信号干扰、阻抗等因素,实际应用中最多不超过32台。
传输介质:常用屏蔽双绞线,通信距离可达 1200 米(RS-485)。
波特率:常见 9600、19200、38400 等,需主从设备一致。
校验方式:使用 CRC(循环冗余校验)确保数据准确性。
数据模型
Modbus 将数据分为 4 种基本寄存器类型:
0x 线圈(Coil):布尔值(ON/OFF),可读写,对应 PLC 的输出点(Q)。
1x 离散输入(Discrete Input):布尔值,只读,对应 PLC 的输入点(I)。
3x 输入寄存器(Input Register):16 位整数,只读,通常用于传感器数据。
4x 保持寄存器(Holding Register):16 位整数,可读写,用于配置参数或控制值。
功能码
Modbus 通过功能码指示要执行的操作,常见功能码包括:
01:读线圈状态(0x)
02:读离散输入(1x)
03:读保持寄存器(4x)
04:读输入寄存器(3x)
05:写单个线圈
06:写单个保持寄存器
15:写多个线圈
16:写多个保持寄存器
报文格式
RTU 模式的报文以二进制形式传输,每个字节包含 8 位数据,格式如下:
从站地址(1 字节):标识接收设备。
功能码(1 字节):指示操作类型。
数据域(N 字节):包含寄存器地址、数量或要写入的数据。
CRC 校验(2 字节):用于错误检测。
示例报文:
主站请求读取从站 1 的 40001-40003 保持寄存器:
01 03 00 00 00 03 C5 CD
01:从站地址03:功能码(读保持寄存器)00 00:起始地址(40001 对应地址 0x0000)00 03:读取 3 个寄存器C5 CD:CRC 校验值
S7-200 SMART中的MODBUS
根据西门子官方提供的s7-200_SMART_system_manual_zh-CHS技术手册。
对于通过 CPU 串口进行的 Modbus RTU 通信,STEP 7-Micro/WIN SMART 和 S7-200 SMART CPU 通过包含预组态的子例程和中断例程,使得与 Modbus 设备的通信更为便捷。
Modbus寻址:Modbus 地址为五到六位数,包含了数据类型和地址值。所有 Modbus 地址均从 1 开始。
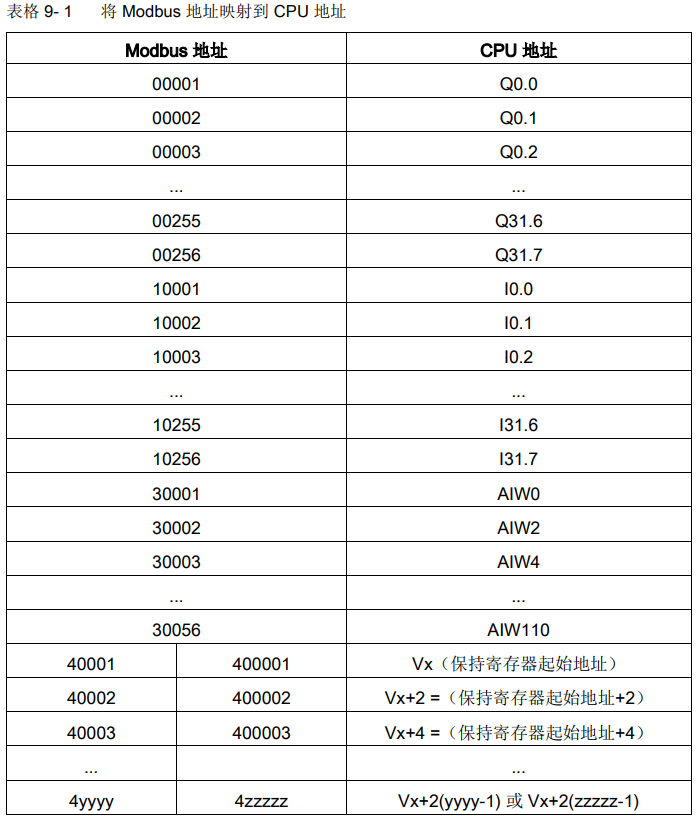
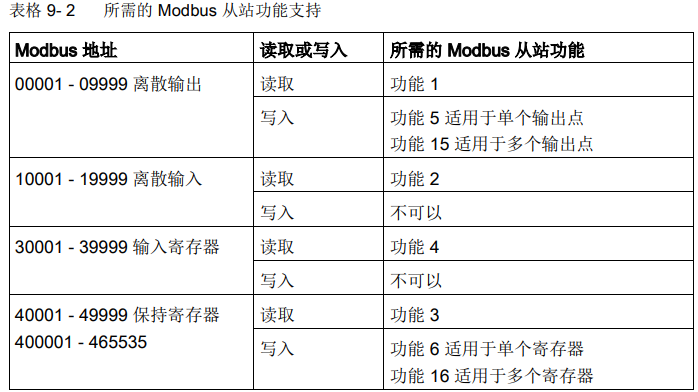
Modbus RTU 主站指令使用如下所示的 Modbus 功能读取或写入特定的 Modbus 地址。Modbus RTU 从站设备必须支持相应的 Modbus 功能,从而读取或写入特定 Modbus 地址。
S7-200 SMART CPU 支持的 Modbus 消息为每条最多 240 个字节(1920 位或 120 个寄存器)的数据。有些从站设备支持的数据可能小于 240 个字节。
Modbus RTU库
MBUS_CTRL/MB_CTRL2 指令用于初始化、监视或禁用 Modbus 通信。
在执行 MBUS_MSG/MB_MSG2 指令前,程序必须先执行 MBUS_CTRL/MB_CTRL2 且不出现错误。该指令完成后,将“完成”(Done) 位置为 ON,然后再继续执行下一条指令。 EN 输入接通时,在每次扫描时均执行该指令。
MBUS_MSG/MB_MSG2 指令,用于启动对 Modbus 从站的请求并处理响应。
EN 输入和 First 输入同时接通时,MBUS_MSG/MB_MSG2 指令会向 Modbus 从站发起主站请求。发送请求、等待响应和处理响应通常需要多个 PLC 扫描时间。EN 输入必须接通才能启用发送请求,并且必须保持接通状态,直到指令为 Done 位返回接通。
某一时间只能有一条 MBUS_MSG 或 MB_MSG2 指令处于激活状态。如果程序启用多条 MBUS_MSG 指令或多条 MB_MSG2 指令,则 CPU 将处理第一条 MBUS_MSG 指令或 MB_MSG2 指令,所有后续 MBUS_MSG 或 MB_MSG2 指令将中止并生成错误代码 6。
MBUS_INIT 指令用于启用,初始化或禁用 Modbus 通信。
在使用 MBUS_SLAVE 指令之前,必须先无错误地执行 MBUS_INIT。该指令完成后,立即置位“ 完成”(Done) 位,然后继续执行下一条指令。 EN 输入接通时,会在每次扫描时执行该指令 。
MBUS_SLAVE 指令用于处理来自 Modbus 主站的请求,并且必须在每次扫描时执行 ,以便检查和响应 Modbus 请求。
电气原理图
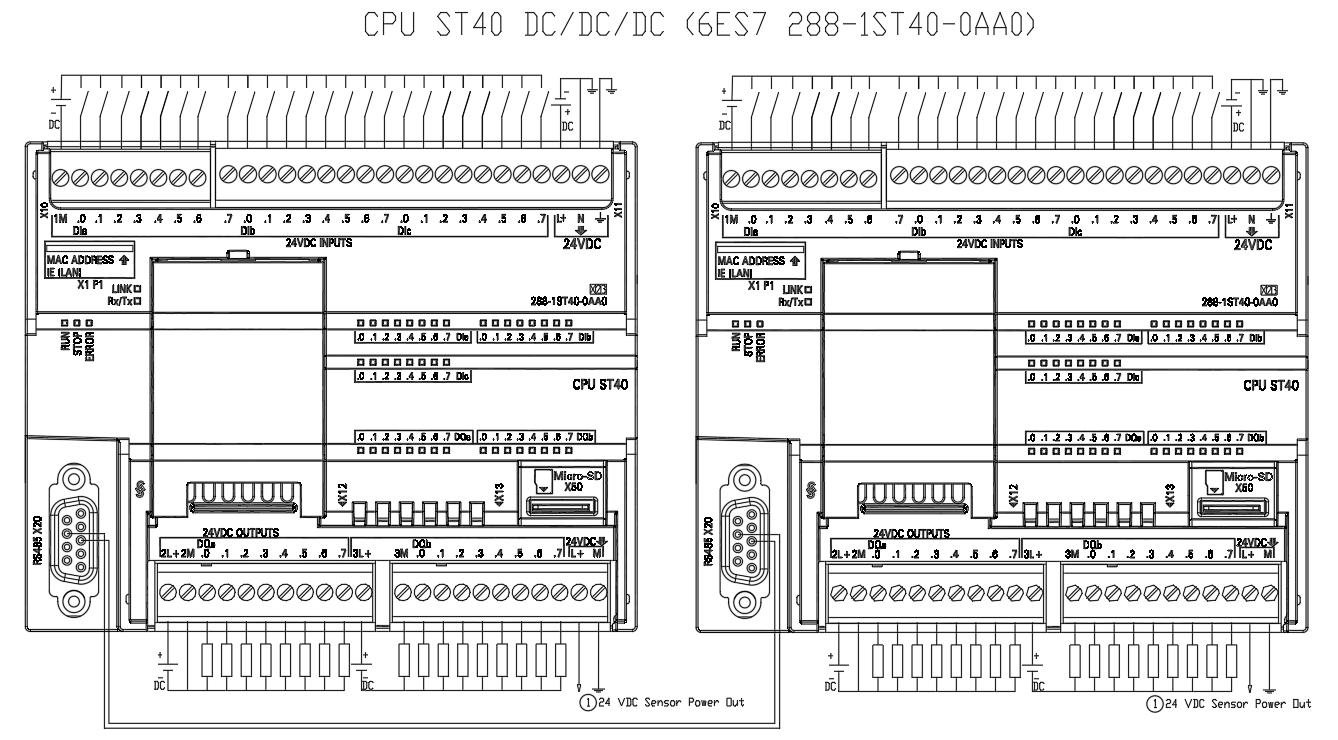
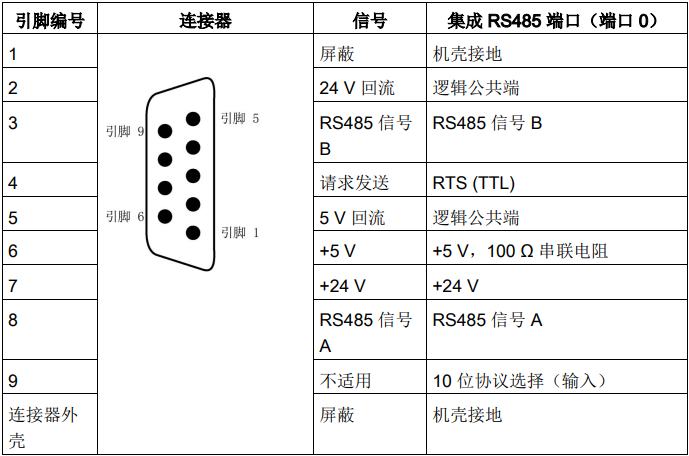
使用RS485 通信端子线对两台PLC进行串口连接,实验中所使用的是引脚3和引脚8。
S7-200 SMART CPU 上的 RS485 通信端口是 RS485 兼容的九针超小 D 型连接器,符合欧洲标准 EN 50170 中定义的 PROFIBUS 标准。下表列出了为通信端口提供物理连接的连接器,并介绍了通信端口的引脚分配。
Modbus主站程序
| LAD | STL | 说明 |
|---|---|---|
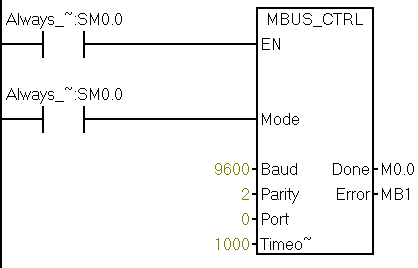 | LD Always_On:SM0.0 = L60.0 LD Always_On:SM0.0 = L63.7 LD L60.0 CALL MBUS_CTRL:SBR1, L63.7, 9600, 2, 0, 1000, M0.0, MB1 | 初始化Modbus主站通信参数 M0.0:初始化完成标志(1=成功) MB1:错误代码(0=无错误)参数: Baud=9600,Parity=2(偶校验),Timeout=1000ms |
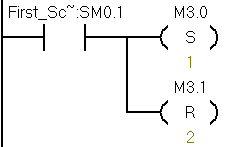 | LD First_Scan_On:SM0.1 S M3.0, 1 R M3.1, 2 | 程序启动时初始化状态机M3.0=1:触发读操作 M3.1/M3.2=0:复位其他状态 |
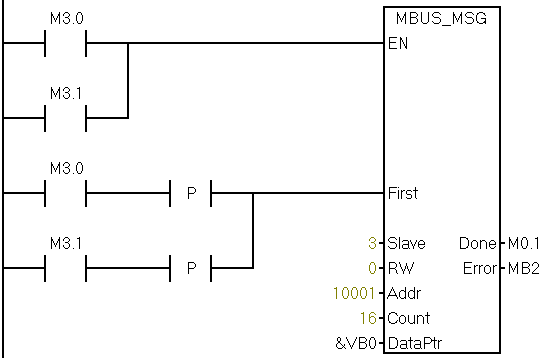 | LD M3.0 O M3.1 = L60.0 LD M3.0 EU LD M3.1 EU OLD = L63.7 LD L60.0 CALL MBUS_MSG:SBR2, L63.7, 3, 0, 10001, 16, &VB0, M0.1, MB2 | 读取从站数据Slave=3(从站地址)RW=0(读操作)Addr=10001(Modbus线圈起始地址)Count=16(读取16个线圈状态)DataPtr=&VB0(数据存储到VB0开始的区域)M0.1:操作完成标志 MB2:错误代码状态机: M3.0触发读请求,完成后通过后续逻辑切换到写操作。 |
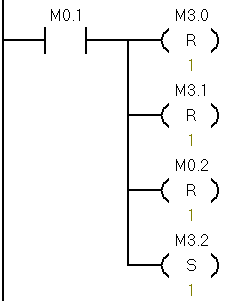 | LD M0.1 R M3.0, 1 R M3.1, 1 R M0.2, 1 S M3.2, 1 | 读写状态切换 读取操作完成后: 清除读状态( M3.0=0) 激活写状态( M3.2=1) |
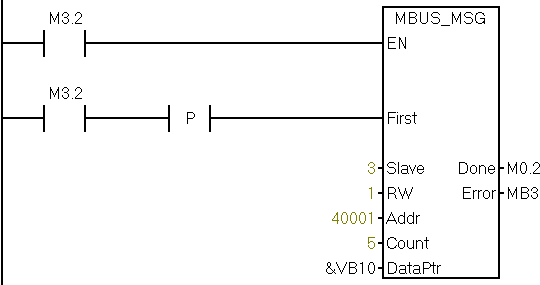 | LD M3.2 = L60.0 LD M3.2 EU = L63.7 LD L60.0 CALL MBUS_MSG:SBR2, L63.7, 3, 1, 40001, 5, &VB10, M0.2, MB3 | 向从站写入数据RW=1(写操作)Addr=40001(保持寄存器起始地址)Count=5(写入5个寄存器)DataPtr=&VB10(数据来源为VB10~VB19)M0.2:写操作完成标志MB3:错误代码 |
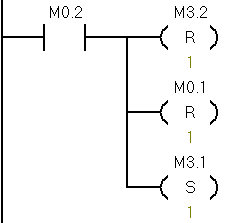 | LD M0.2 R M3.2, 1 R M0.1, 1 S M3.1, 1 | 写操作完成后重新激活读状态(M3.1=1),形成持续轮询 |
Modbus从站程序
| LAD | STL | 说明 |
|---|---|---|
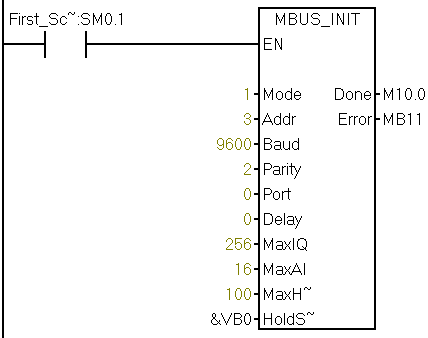 | LD First_Scan_On:SM0.1 CALL MBUS_INIT:SBR1, 1, 3, 9600, 2, 0, 0, 256, 16, 100, &VB0, M10.0, MB11 | 初始化为从站(地址=3)Mode=1(从站模式)Addr=3(从站地址)Baud=9600,Parity=2(偶校验)Delay=0,Timeout=100ms &VB0:保持寄存器起始地址(对应主站40001)M10.0:初始化状态 MB11:错误代码 |
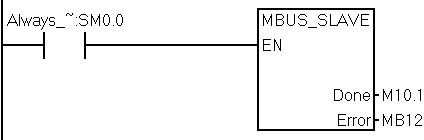 | LD Always_On:SM0.0 CALL MBUS_SLAVE:SBR2, M10.1, MB12 | 持续处理Modbus请求M10.1:请求处理状态 MB12:错误代码 |
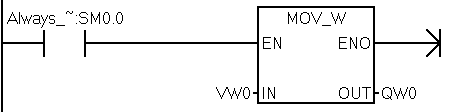 | LD Always_On:SM0.0 MOVW VW0, QW0 | 将保持寄存器VW0(VB0+VB1)映射到物理输出端子主站写入 40001会影响VW0,进而控制PLC的实际输出。 |
主从站波特率(9600)、校验(偶校验)、从站地址(3)需要保持一致。
主站读地址
10001对应从站线圈,写地址40001对应从站VB0开始的保持寄存器。
主从通信交互流程图
心得体会
本次基于西门子S7-200 SMART PLC的ModbusRTU通信实验,使我深入理解了工业现场总线协议的实际应用与PLC主从站协同工作机制。通过PLC课程实验,使我入门了解了基础的PLC程序设计与编写的过程。
这里,笔者就PLC与单片机开发的差异谈谈一些自己的理解与观点。
在PLC程序设计中,LAD是工业控制领域专用语言,将物理继电器符号数字化(如| |表示常开触点),让电气工程师无需编程基础即可设计逻辑,其设计思想是图形化继电器逻辑。梯形图的这种特性,让电气工程师无需编程基础即可设计逻辑,降低工业控制逻辑的实现门槛。但对于软件工程师来说,这种逻辑思维转变是较为抽象且具有一定门槛的。
单片机的开发更加接近传统软件开发的思维,如果学习者学过Python或者其他编程语言,上手单片机C/C++开发十分迅速,并且单片机开发生态目前也在拓展支持Rust、Micro python等开发方式。
以一个定时闪烁点灯任务为例,使用单片机开发(这里指通过硬件抽象层HAL库进行开发,非寄存器开发),逻辑代码在10行以内,且有编程经验的开发者,即使从未接触过单片机开发,也能通过代码注释,完全理解函数含义,理解代码实现的状态逻辑切换。在这种开发模式中,循环判断等基本概念与普通的软件开发并无差别。通过HAL库对单片机进行硬件操作,其体验是与桌面软件开发中调用系统API十分相近的。
而在同样的任务中,PLC编程需要搭建数段梯形图逻辑网络,这种电气工程师思维需要一定时间的学习。对于没有任何电气基础的学习者而言,初次上手仅靠注释读懂逻辑是十分困难的,这种电流流动 → 逻辑结果的开发思维并不比状态迁移 → 硬件动作的开发思维转换更容易。在梯形图学习中,笔者走进过把常开触点当做是逻辑判断的误区,使用梯形图进行复杂的逻辑开发重新学习成本相对更高。且笔者认为在可读性方面,梯形图是没有带来提升的。
网上经常有的一种论调是,PLC开发比单片机开发更容易上手。可能在几年前确实是这样的,单片机开发往往面临硬件碎片化的特点,想要实现简单的功能,都需要编写冗余的寄存器控制程序。但是近年来HAL库(抽象硬件层开发)正在逐步推开,STM32的最新系列都不再支持传统的寄存器和基础库开发。以ST、TI、海思在内MCU厂商都提供了图形化开发界面的支持,国内也有很多厂家在做有关的技术跟进。单片机开发的门槛是在不断降低的,图形化+HAL库使得开发者仅需要鼠标点点确定,就能完成底层硬件的系统配置,从而使得开发者能够专注于逻辑功能的开发实现。在现今的技术背景下,PLC编程并不见得会比单片机更加快速和便捷。
但是话说回来了,在嵌入式开发中,软件开发仅仅只是一部分,单片机开发想要实现具体的功能,离不开对应的硬件电路,缺一不可。PLC是工业场景优化后的单片机系统,专为工业而生,其软硬件架构为可靠性牺牲了部分灵活性,却大幅提升了稳定性。软件上,PLC循环扫描的工作模式,无需考虑时序竞争。硬件上,PLC提供了各种工业级的保护条件(信号隔离/电源冗余设计)。
综上所述,PLC开发与单片机开发其实没有任何可比性(虽然对于在校学生做的实验来说,看起来PLC在做与单片机相同的逻辑开发)。笔者认为PLC的诞生就是工业标准化规范化的产物,提供了一套现场开发的逻辑范式,故PLC与开关电源、各种接线电缆、低压电器等彼此适配,现场维护简单。而单片机开发则更加定制化,需要根据功能是进行硬件设计,单片机开发能裁剪出任何形态,但使用效果取决于持刀者功力。
PLC 与单片机的差异本质上是 “工业标准化” 与 “通用灵活性” 的区别,一个主打工业自动化控制、一个主打消费电子场景。因而在大多数场景下,两者没有对比的必要性。这完全是两种不一样的市场,学习PLC亦或是选择单片机,需要取决于个人的就业选择。